Basic Info.
Model NO.
SHR-HVLV3020HZIR750R-AT
Kind
Autofocus Lens
Certification
CE, FCC, RoHS, ISO9001: 2000
Feature
Waterproof / Weatherproof, Mini Size
Effective Distance
Over 1000m
Sensor Size
1/4 inch
Remote Control
With Remote Control
Thermal Detection Distance
15400m for Human, 19600m for Vehicle
Thermal Recognition Distance
7000m for Human, 12000m for Vehicle
Daylight Camera Distance
5000m
Thermal Lens
34-690 mm, 20 X Optical Zoom
Thermal Lens Control
Electric Focus, Auto Focus
Thermal Lens Space Resolution
0.02~0.44 Mrad
Daylight Camera Lens
12.5-750 mm,60 X Optical Zoom
Protection Degree
IP66
Presets
128
Detector
Cooled Fpa
Transport Package
Carton / Wooden Case
Specification
50 kg
Trademark
Sheenrun
Origin
Shandong Province, China
Production Capacity
50 Units / Year
Product Description
Radar Electro-optical Linkage Monitoring System
1. Overview
Radar electro-optical linkage monitoring system is a kind of mobile ground reconnaissance and command system with multi-sensors working together. Its main function is to quickly search, find, identify, track and locate the ground moving target. It is mainly used for on-the-ground or low-altitude long range day and night monitoring in the designated area such as frontier defense, border on duty, key-area surveillance, anti-terror work, etc.
Main features:
As the ground or low-altitude moving target detection and reconnaissance mobile equipment, radar electro-optical linkage system can detect the moving target on the ground or flying target in low altitude under complex climate conditions, meet the requirements of the application of day and night monitoring. It mainly has functions such as search & discovery, tracking & identification, information comprehensive-processing & display, and emergency information security, etc.
2.1. Search & discovery
The system mainly uses the electro-optical equipment and ground reconnaissance radar as the detection front end, realizing the moving target's search & detection, automatic tracking & identification and positioning; Achieve full-range, all-weather search & discovery and detection of moving target on the ground or in the ultra-low altitude or other defense area. The system has the standard data interface, which can be connected to the superior monitoring center by means of digital microwave, 4G and other communication equipment, and real-time reporting information of target activity information.
2.2. Tracking & identification
By radar and electro-optical equipment can automatically track the moving target in the detection area. Real-time motion trajectory of moving target in the area of defense can be displayed on the on-board monitoring display screen, and carries on the image recognition, display and storage and retrieval.
2.3. Information comprehensive-processing& display
The system can search, number and mark multiple targets through the fusion of multi-source information such as radar and electro-optical device, and in real time generates multi-objective comprehensive situation map based on 3D GIS. In the comprehensive situation diagram, we can pop up the window in the form of the click target, displaying the target's video/image and location, speed and other information; The system can also display information such as visible light, infrared video, etc. And send monitoring information to the monitoring center.
2.4. Emergency information security
System can move swiftly to emergency location and area on the defense line, all-weather, remote surveillance reconnaissance, search and tracking moving target, generating real-time comprehensive situation based on GIS, back to monitor command center, to provide disposal of comprehensive emergency with powerful intelligence support.
3. System composition
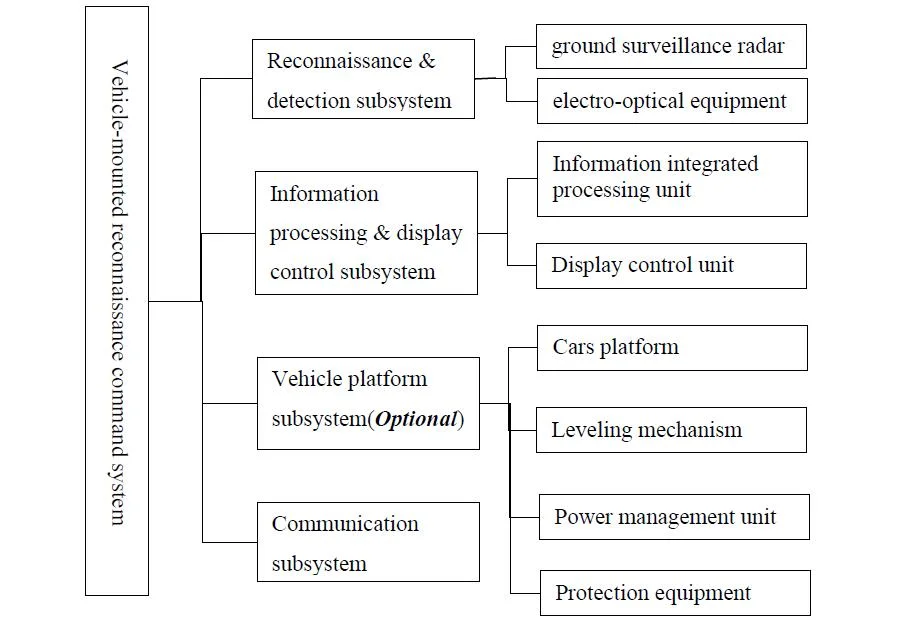
The radar electro-optical linkage system consists of the following components: reconnaissance & detection subsystem,information processing & display control subsystem, vehicle platform subsystem (Optional) and communication subsystem. Reconnaissance & detection subsystem including ground surveillance radar and electro-optical reconnaissance equipment; information processing and display control subsystem consists of information integrated processing unit, the display control unit, control platform; vehicle platform subsystem including cars platform, leveling mechanism, power management unit and protection equipment, etc., its composition block diagram as shown in the figure below.
Radar electro-optical linkage monitoring system is a kind of mobile ground reconnaissance and command system with multi-sensors working together. Its main function is to quickly search, find, identify, track and locate the ground moving target. It is mainly used for on-the-ground or low-altitude long range day and night monitoring in the designated area such as frontier defense, border on duty, key-area surveillance, anti-terror work, etc.
Main features:
- Coordination of radar system and electro-optical systems, complementary advantages;
- Multi-function monitoring, can detect the moving target on the ground;
- Adopt infrared thermal imaging and visible light cameras to realize the target detection, tracking and identification night and night.
As the ground or low-altitude moving target detection and reconnaissance mobile equipment, radar electro-optical linkage system can detect the moving target on the ground or flying target in low altitude under complex climate conditions, meet the requirements of the application of day and night monitoring. It mainly has functions such as search & discovery, tracking & identification, information comprehensive-processing & display, and emergency information security, etc.
2.1. Search & discovery
The system mainly uses the electro-optical equipment and ground reconnaissance radar as the detection front end, realizing the moving target's search & detection, automatic tracking & identification and positioning; Achieve full-range, all-weather search & discovery and detection of moving target on the ground or in the ultra-low altitude or other defense area. The system has the standard data interface, which can be connected to the superior monitoring center by means of digital microwave, 4G and other communication equipment, and real-time reporting information of target activity information.
2.2. Tracking & identification
By radar and electro-optical equipment can automatically track the moving target in the detection area. Real-time motion trajectory of moving target in the area of defense can be displayed on the on-board monitoring display screen, and carries on the image recognition, display and storage and retrieval.
2.3. Information comprehensive-processing& display
The system can search, number and mark multiple targets through the fusion of multi-source information such as radar and electro-optical device, and in real time generates multi-objective comprehensive situation map based on 3D GIS. In the comprehensive situation diagram, we can pop up the window in the form of the click target, displaying the target's video/image and location, speed and other information; The system can also display information such as visible light, infrared video, etc. And send monitoring information to the monitoring center.
2.4. Emergency information security
System can move swiftly to emergency location and area on the defense line, all-weather, remote surveillance reconnaissance, search and tracking moving target, generating real-time comprehensive situation based on GIS, back to monitor command center, to provide disposal of comprehensive emergency with powerful intelligence support.
3. System composition
The radar electro-optical linkage system consists of the following components: reconnaissance & detection subsystem,information processing & display control subsystem, vehicle platform subsystem (Optional) and communication subsystem. Reconnaissance & detection subsystem including ground surveillance radar and electro-optical reconnaissance equipment; information processing and display control subsystem consists of information integrated processing unit, the display control unit, control platform; vehicle platform subsystem including cars platform, leveling mechanism, power management unit and protection equipment, etc., its composition block diagram as shown in the figure below.
Figure 1 Radar electro-optical linkage monitoring system composition.
3.1. Reconnaissance & detection subsystem
The reconnaissance & detection subsystem includes ground surveillance radar, electro-optical reconnaissance equipment, etc., realizing the reconnaissance and detection of the moving target on the ground and in ultra-low altitude area.
Reconnaissance & detection subsystem is mainly to quickly search, find, identify, early warn, track and locate the ground moving target on the ground and in low altitude area day and night, and integrate radar detection, electro-optical detection, image processing, and precision machinery in a body.
3.1.1 Ground Surveillance Radar
Ground surveillance radar are mainly used for reconnaissance and detection of human, vehicles, and a low-level target under complex climate conditions at the border. It has small volume, light weight, simple operation and high reliability etc. The radar has a rotating drive mechanism and a collector ring, which greatly improves the reliability and continuous working time of the equipment. Its appearance schematic diagram is shown in figure 2.
The radar is a kind of portable multi-purpose surveillance radar system, using FMCW system, has small volume, light weight, small blind area and distance, high range resolution and good anti-jamming performance, etc. The radar design has Ethernet interface, wireless digital communication interface, positioning system and electronic map background, etc., which can be exchanged with other equipment such as electro-optical equipment.
Main Features:
The reconnaissance & detection subsystem includes ground surveillance radar, electro-optical reconnaissance equipment, etc., realizing the reconnaissance and detection of the moving target on the ground and in ultra-low altitude area.
Reconnaissance & detection subsystem is mainly to quickly search, find, identify, early warn, track and locate the ground moving target on the ground and in low altitude area day and night, and integrate radar detection, electro-optical detection, image processing, and precision machinery in a body.
3.1.1 Ground Surveillance Radar
Ground surveillance radar are mainly used for reconnaissance and detection of human, vehicles, and a low-level target under complex climate conditions at the border. It has small volume, light weight, simple operation and high reliability etc. The radar has a rotating drive mechanism and a collector ring, which greatly improves the reliability and continuous working time of the equipment. Its appearance schematic diagram is shown in figure 2.
The radar is a kind of portable multi-purpose surveillance radar system, using FMCW system, has small volume, light weight, small blind area and distance, high range resolution and good anti-jamming performance, etc. The radar design has Ethernet interface, wireless digital communication interface, positioning system and electronic map background, etc., which can be exchanged with other equipment such as electro-optical equipment.
Main Features:
- Light weight, compact radar
- 24 hours/day working
- Strong-suppression of ground wave, low false alarm rate
Figure 2 Ground Surveillance Radar
Overview: - Frequency: I/J band (9.5 to 10.5 G)
- Detection distance :
- Human 5km; vehicle:10km
- Precision: distance 10 m/azimuth Angle 0.4 °
- Antenna search scope: fan search area and 360 degrees
- Power output: 10 mW, 100 mW, 1 W under-control
- Search speed: 6 ° / s, 12 ° / s, 24 ° / s
- Power consumption: DC 24 v ≤40 W
- radar front-end unit: 600 * 320 * 128 mm
- radar terminal unit: 270 x 220 x 60 mm
| No. | Item | Indicator | Remark |
| 1 | Radar system | Linear frequency modulation continuous wave radar system | |
| 2 | Detection distance | ≥5km Human ≥10km Vehicle | |
| 3 | Measurement accuracy | Azimuth accuracy(rms) ≤ 0.5° Range measurement accuracy(rms)≤ 10m | |
| 4 | Detection Zone | Scan modle:360° | |
| Tilt beam angle:20° | |||
| 5 | Search speed | 60°/S; | |
| 6 | Detected target speed | (0.2-30)m/s | |
| 7 | Weight | Main body:≤25kg | |
| 8 | Continuous working hours | 7×24 h | AC working state |
| 9 | Multi-target processing ability | TWS track:22 batch | |
| 10 | Antijamming capability | It has the ability to inhibit the interference with the same frequency; It has the ability of anti-ground clutter, wave clutter and weather clutter; | |
| 11 | Installation | Stationary and vehicle-mounted | |
| 12 | Reliability & maintainability | MTBF:≥5000 h; MTTR:≤0.5 h | |
| 13 | Interface | Ethernet | |
| 14 | Size | Radar front-end:Ø676mm×550mm; | |
| 15 | Environmental adaptation | Working Temperature:-20ºC~+55ºC; Storage temperature:-25ºC~+65ºC. Humidity:+35ºCcondition,≥ (95±3)%; Rain proof:moderate-to-heavy rain; Dust proof, Anti-salt fog; |
The Electro-optical Reconnaissance Camera consists of visible light camera, cooled infrared thermal camera, precision reloading pantilt platform and intelligent video processor, as shown in FIG. 3. The Electro-optical Reconnaissance Camera mainly completes the day and night tracking, identification and detection of the target in complex background.
Figure 3 Electro-optical Reconnaissance Camera
Main Features:
- Adopt continuous zoom thermal imaging technology, imaging is clear, not only realize a wide range of search, but also can identify the target in the distance
- Dual sensor design, can search, track, identify and locate the target day and night.
- 640×512 high resolution cooled sensor,15µm pixel, detect more clearly and longer distance
- Advanced image noise reduction processing, increase the digital image detail enhancement, black/white/hot pseudo color image output
- Embedded intelligent video image processing system to meet the complex geographical environment of target search, capture, tracking and recognition.
- Low power consumption, start quickly, stable performance, image clear, uniform picture
- The operation is simple, easy to use and maintenance
- Precision casting aluminum alloy shell, sealed waterproof, filled with nitrogen gas, resistance to bad environment, ultralong working life
| Detection distance | Visible light | 5000m | ||
| Thermal imaging | Target | Human(1.8m×0.5m) | Vehicle(2.3m×2.3m) | |
| Detection | 15400m | 19500m | ||
| Recognition | 7000m | 12000m | ||
| Identification | 4000m | 8400m | ||
| HD lens | Focal length | 12.5~750mm | ||
| FOV | 0.6°~35° | |||
| Auto focus | Support | |||
| HD camera | Sensor type | 1/1.8'' Progressive Scan CMOS | ||
| Coding format | H.264/H.265/MJPEG | |||
| Video resolution | 1080P,CIF,supporting three stream | |||
| Video bit rate | 32Kbps~16Mbps | |||
| Video frame rate | 1~25F/S (50Hz), 1~30F/S (60Hz) | |||
| Thermal lens | Focal length | 50~750mm | ||
| FOV | 0.8°×0.7°~16.1°×12.9° | |||
| Space resolution | 0.02~0.44mrad | |||
| Lens control | E-zoom, e-focus | |||
| Detector | Type | Cooled FPA | ||
| Resolution | 640×512 | |||
| Spectrum range | 3.7~4.8μm | |||
| NETD | ≤25mK | |||
| Frame rate | 25Hz | |||
| NUC | Auto/ manual/ background correction | |||
| Image process | DDE | |||
| Video output | PAL | |||
| Starting time | ≤7.5minute (25ºC) | |||
| Pantilt | Load | 50kg(Top load) | ||
| Angle | Pan: 360° endless continues rotating,Tilt: -45°~+45° | |||
| Speed | Pan: 0.01°~12°/s,Tilt: 0.01°~8°/s | |||
| Presets | 255 | |||
| Auto cruise | 2,everyone can have 64 presets | |||
| Auto scan | 1 | |||
| Interface | Power | DC30V | ||
| Network | 1×10Base-T/100Base-TX,RJ45 interface | |||
| Environmental indicators | Working temperature | -25ºC~+55ºC | ||
| Storage temperature | -40ºC~+65ºC | |||
| Protection grade | IP66 | |||
| Power | Whole power | Width input AC90 ~ 305V to DC30V / 8A waterproof power supply | ||
| Power consumption | ≤150W | |||
| Physical features | Installation | Outdoor base install | ||
The main task of the information processing and display control subsystem is to receive the video image information of the electro-optical reconnaissance instrument, the target coordinate information of the radar detection, the alarm information transmitted by other sensors, etc. Preliminary image processing & information fusion processing form the information of local regional comprehensive situation; At the same time, it can receive control instructions issued by the supervisory control center, and directly implement the control of the system. The information processing and display control system includes the display control unit and the integrated information processing unit.
The display control unit
Display control unit includingradar terminal, optical terminals, communication controller, network switches, streaming media server and other equipment, is the data processing, operation and control and display system, completing the operation and control of the reconnaissance detection subsystem.
1) Radar display control terminal
It is mainly used to control the turn-on/shutdown of radar, the rotation of the antenna, various parameter settings, radar signal processing and data processing, and monitoring the working state of radar.
Main function:
a) Monitor area settings
Scanning can be set to adapt to different mission requirements such as monitoring key areas and search and finding;
b) Target tracking and automatic fitting trajectory
Track the target while scanning, multi-objective can be processed simultaneously; The target entering the delimited area can be automatically matched the track and alarm.
c) Display function Display target trace, target track and target parameters (batch number, distance, location, speed); Display target background objects and clutter; Showing ground clutter; Display alarm area, alarm line; Display system work parameters, working status, etc.
d) Setting function
Set the working status and display status of the syetem.
e) Record function
To record the working time and the accumulated working time of radar; Record clutter and target data; Playback and display of historical record data, etc.
2) Electro-optical display and control terminal
Mainly responsible for the control of electro-optical reconnaissance equipment, including switching on/off machine, azimuth pitching servo control, camera and infrared thermal imager control.
Main features
a) Control function:
Electro-optical control, including the switching of/off of the electro-optical equipment, azimuth pitching servo control, lens zoom control, multi-function mode control of infrared night-vision camera, a set of control system can control multiple front-end electro-optical reconnaissance equipment.
b) Target automatic capture & alarm function:
Moving target in monitoring area can be found automatically by the intelligent video processor and can be automatic tracked, recognized. It can realize automatic electro-optical control, without personnel duty for a long time.
4. System characteristics
Radar Electro-optical Linkage Monitoring System is a new type of mobile ground reconnaissance system which adopts a variety of advanced technology, specifically for the ground and a low-level area detection. It can be all-weather, omni-directional to detect moving target on the ground or in a low-level area, finishing the goal of target reconnaissance, surveillance, tracking and processing.
Main characteristics:
a) The detection equipment is flexible
Adopting modular design technology, according to the actual demand it can choose a variety of detection equipment flexibly. Radar has the characteristics of rapid detection of target in day/night and under the condition of all kinds of weather. And electro-optical detection equipment can provide target imaging, not affected by electromagnetic interference, also has the characteristics of working day and night. Combining these two kinds of equipment together, the system can search, find, identify, track and locate the ground moving target quickly under the condition of all-weather, all-day, complicated electromagnetic environment and complex geographical conditions.
b) Multiple sensor & data fusion, comprehensive search & accurate location
A variety of technical means (radar, electro-optical device) carrying out a full range of reconnaissance, advanced data fusion technology can achieve the goal of quick search, identification and location, real-time display of moving target trajectory and image information, provide rich target information to the inspector.
c) Simple operation and intuitive display
Based on the general situation map of GIS and GPS, the information about the distribution of each reconnaissance unit, the location of the moving target, the movement trajectory and the image can be directly displayed, which can greatly improve the field reconnaissance efficiency. It can also manually set multiple alarm areas and alarm lines of any shape on the electronic map, which can automatically alarm when the moving target across the alarm line or appears in the alarm area.
d) Modular networked design with strong expansibility
Each main equipment is modular designed, and can be flexible combination. The system is networked and can be easily networked to form a regional reconnaissance command network, which can be easily integrated into the existing border monitoring system. The communication controller with various interfaces is adopted to make the system more compatible and expansible.
e) Advanced design, high reliability
The radar adopts omnidirectional electric scanning technology, no mechanical scanning mechanism. The electro-optical equipment adopts the intelligent video processing technology. All the equipment are fully sealed and designed to make the system fit to work well in the harsh environment.
5. System working procedure
5.1 System on
The probe device is activated and the system calibration is completed.
5.2 Radar searching and guiding the electro-optical rotating
The ground reconnaissance radar scanned the surrounding area or the designed area, and when the moving target was found, the alarm information was sent out and the electro-optical equipment was guided to the target.
5.3 Electro-optical capture and tracking target
When the electro-optical device is transferred, the search will be automatically carried out so that the target can be locked in the field and the target can be captured. After the target is captured, the system enters the automatic tracking state and automatically tracks and identifies the target.
5.3.1 Manual tracking
Manual tracking status, equipped with a joystick or mouse buttons can be used for manual tracking. When target capturing and tracking algorithm are set, manual rotate the pan/tilt to select target objects. When the target is elected, the objects will have captured frame. Then the joystick use tracking buttons into tracking mode. If you use the mouse, left key click into tracking mode. After entering the tracking mode, pan/tilt automatically tracks the target according to the target trajectory. wholly automatic tracking mode control pan/tilt operation. Click on the joystick tracking button or the left mouse button to unlock the current target.
5.3.2 Automatic tracking (Optional)
If the device has automatic tracking mode, when radar gives level pitch angle, pan/tilt rotates to the set position, and then enter the automatic capture mode. By automatic capture mode, after target moves into designed area, the tracking mode start, then the automatic tracking function to capture the target and track it, so as to realize the tracking of broke-into moving target. | | |
5.4 Fusion positioning and situation display
When the electro-optical device is tracking automatically, the target angle data is output. The target positioning is achieved with the fusion of target angle data and radar distance data. And the target position and motion trajectory are shown in the comprehensive situation map.